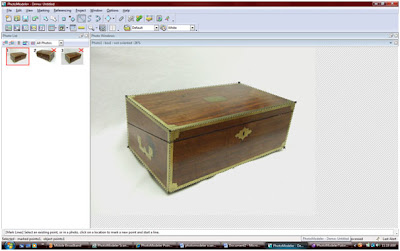
Starting with photo one I marked the visible points of the box.
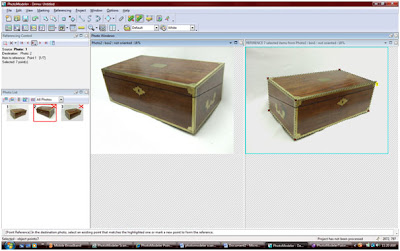
In reference mode, using photo one as the reference image (shown by the blue boundary around the photo), I marked the corresponding points on photo 2.
 By opening the 3d view I could see how much of the box had been built.
By opening the 3d view I could see how much of the box had been built.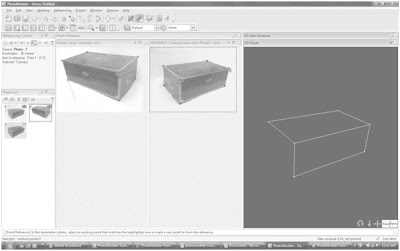
Again using photo one as the reference image I marked the corresponding points on photo three. Camera position were now solved and could be seen in the 3d view port.
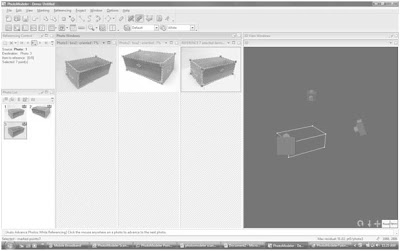 I drew the missing lines onto photo three, then using photo three as the reference image I marked the corresponding points onto photo two. The box was then shown as complete in the 3d model view.
I drew the missing lines onto photo three, then using photo three as the reference image I marked the corresponding points onto photo two. The box was then shown as complete in the 3d model view. 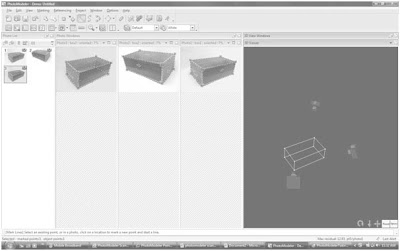 Using the surface tool I added surfaces to each face of the box, which showed as white planes in the 3d view.
Using the surface tool I added surfaces to each face of the box, which showed as white planes in the 3d view. 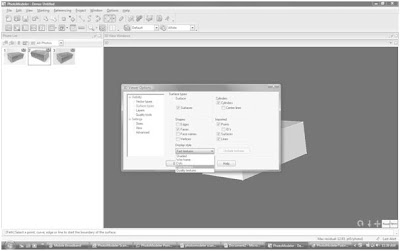 Using the 3d view options I turned on fast textures and the program mapped images from the original photos onto the 3d view. The image was warped warped.
Using the 3d view options I turned on fast textures and the program mapped images from the original photos onto the 3d view. The image was warped warped. 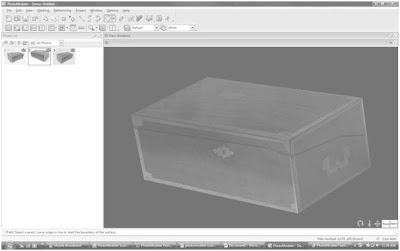 By changing the view option to quality texture I got a more accurate representation of the original box.
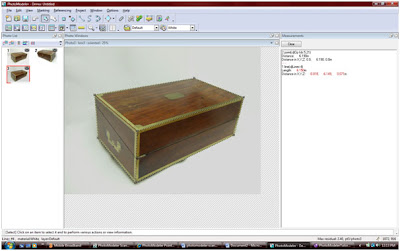
By changing the view option to quality texture I got a more accurate representation of the original box.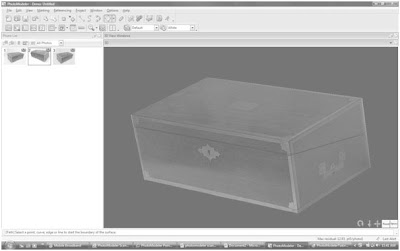 I then zoomed in on each point of my box in the original photos and adjusted my frame to better fit the image increasing the accuracy of the model.
I then zoomed in on each point of my box in the original photos and adjusted my frame to better fit the image increasing the accuracy of the model.
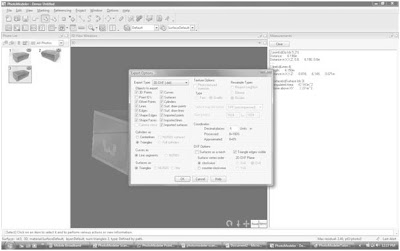
 Finally I used the project menu to open up the scale/orientate window. Using this window I set the units of my project and used a known length to set a scale. I also set the horizontal and vertical directions.
Finally I used the project menu to open up the scale/orientate window. Using this window I set the units of my project and used a known length to set a scale. I also set the horizontal and vertical directions.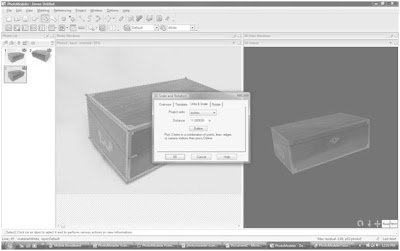
The program automatically calculated the measurements of the rest of the box. I could then find out any measurement simply by clicking on it.
 The model was complete and ready to be exported for use in other cad software.
The model was complete and ready to be exported for use in other cad software.